Revista Cartográfica 105 | julio-diciembre 2022 | Artículos
ISSN (impresa) 0080-2085 | ISSN (en línea) 2663-3981
DOI: https://doi.org/10.35424/rcarto.i105.1094
Artículo de acceso abierto bajo la licencia https://creativecommons.org/licenses/by-nc-sa/4.0/
Análise do uso de dados GPS/GLONASS em diferentes métodos de posicionamento por satélites considerando a influência das condições ionosféricas brasileiras
Analysis of the use of GPS/GLONASS data for different satellite positioning methods considering the influence of the Brazilian ionospheric conditions
Gabriel Oliveira Jerez 1
Daniele Barroca Marra Alves2
Recebido 22 de novembro de 2021; aceito 30 de março o de 2022
RESUMO
O GLONASS (GLObal NAvigation Satellite System) e o GPS (Global Positioning System) são os sistemas pioneiros de navegação global por satélite. A utilização combinada de dados GPS e GLONASS despertou interesse inicialmente, mas as pesquisas com investigação de ambos os sinais diminuíram muito no final da década de noventa devido à rápida degradação que o GLONASS sofreu. Porém, após um plano de restabelecimento do sistema, em 2011 o GLONASS voltou a contar com constelação completa e cobertura global. Além do restabelecimento, o sistema passou ainda por um processo de modernização, com novas gerações de satélites desenvolvidas, refinamentos dos sistemas de tempo e referência e novas estações de controle instaladas. Além do uso de dados combinados, outros fatores que influenciam a qualidade do posicionamento são os métodos empregados e os erros aos quais os sinais transmitidos estão sujeitos. Em relação aos erros, a ionosfera é uma importante fonte, especialmente para usuários de receptores de simples frequência. Com este cenário, o presente trabalho buscou realizar um estudo sobre o sistema GLONASS, bem como analisar as melhorias apresentadas no posicionamento utilizando seus dados combinados aos dados GPS em diferentes métodos de posicionamento, considerando diferentes condições ionosféricas. De modo geral, foi possível verificar a viabilidade do uso de dados GLONASS combinados ao GPS em todos os métodos de posicionamento avaliados, com melhoria em mais de 97% dos casos analisados para o posicionamento por ponto e em torno de 70% dos casos com posicionamento relativo.
Palavras chave: Posicionamento, GPS/GLONASS, PPP, VRS, Ionosfera.
ABSTRACT
GLONASS (GLObal NAvigation Satellite System) and GPS (Global Positioning System) are the pioneer satellite navigation systems. The combined use of GPS and GLONASS data initially aroused interest, but research investigating both signals declined greatly in the late nineties due to the fast degradation that GLONASS suffered. However, after a plan to re-establish the system, in 2011 GLONASS returned to a complete constellation and global coverage. In addition to the reestablishment, the system also went through a modernization process, with new generations of satellites being developed, refinements of the time and reference systems and new control stations being installed. Besides the use of combined data, other factors that influence the positioning quality are the methods employed and the errors to which the transmitted signals are subject. Regarding errors, the ionosphere is an important source, especially for users of simple frequency receivers. Considering this scenario, the present work aimed to conduct a study of the GLONASS system, as well as to analyze the improvements presented in the positioning using its data combined with GPS data in different positioning methods, considering different ionospheric conditions. In general, it was possible to verify the viability of using GLONASS data combined with GPS in all the positioning methods evaluated. In general, it was possible to verify the viability of using GLONASS data combined with GPS in all the positioning methods evaluated, with improvement in more than 97% of the cases analyzed for point positioning and around 70% of the cases with relative positioning.
Key words: Positioning, GPS/GLONASS, PPP, VRS, Ionosphere.
1. Introdução
O desenvolvimento dos Sistemas de Navegação Global por Satélite (Global Navigation Satellite Systems —GNSS) foi uma revolução para as atividades que envolvem posicionamento. O GNSS é composto pelo GPS (Global Positioning System, http://gps.gov/), GLONASS (GLObal NAvigation Satellite System, https://glonass-iac.ru/en/), Galileo (http://galileoic.org/) e BeiDou (http://beidou.gov.cn/), além dos sistemas de aumento baseados em estações terrestres e satélites.
Com a obtenção de constelações completas pelos sistemas pioneiros, GPS e GLONASS, em 1995, a utilização de dados combinados despertou grande interesse devido ao número de satélites disponíveis que o uso dos dois sistemas em conjunto poderia oferecer (Hofmann-Wellenhof et al., 2008). Porém, pouco tempo após se tornar operacional, o GLONASS passou por um longo período de degradação devido à falta de investimentos e à curta vida útil dos primeiros satélites. Com isso, o GLONASS chegou a contar com constelação de apenas seis a oito satélites disponíveis em alguns períodos de 2001 (Polischuk et al., 2002; Feairheller e Clark, 2006).
Neste contexto, a maior parte das pesquisas desenvolvidas se concentrou na aplicação dos dados do sistema GPS, uma vez que, com constelação incompleta, o GLONASS apresentava resultados variáveis e, muitas vezes, insatisfatórios, principalmente devido à instabilidade no número de satélites visíveis durante o período de coleta (Polezel, 2010; Bruyninx, 2007). Porém, a partir de 2001, teve início um plano de restabelecimento e modernização do GLONASS, garantindo primeiramente a cobertura completa do território russo e, posteriormente, cobertura global (Feairheller e Clark, 2006). Com a modernização, novas gerações de satélites foram desenvolvidas e novas estações de monitoramento passaram a ser instaladas em todo o globo. Em 2011 o GLONASS restabeleceu sua constelação, voltando a proporcionar novamente cobertura global.
Além dos sistemas utilizados no posicionamento GNSS, é de fundamental importância a realização de investigações relativas às fontes de erros aos quais os sinais GNSS estão sujeitos. Do satélite ao receptor GNSS, o sinal transmitido pode sofrer diversas formas de influência e degradação. Entre as principais fontes de erros destacam-se as relacionadas ao satélite, à propagação do sinal, ao receptor e à própria estação. A atmosfera, em particular, tem grande influência na propagação dos sinais GNSS, sendo a ionosfera uma das principais fontes de degradações e erros, principalmente para usuários de receptores de simples frequência (Seeber, 2003; Monico, 2008).
A atividade ionosférica tem relação com a atividade magnética, estação do ano, ciclos solares e localização geográfica, sendo mais intensa nas regiões equatoriais, menos intensa nas latitudes médias e seguindo comportamento menos previsível nas altas latitudes. Nas regiões equatoriais os efeitos da ionosfera são relacionados à anomalia equatorial com intensidade maior no pico local da anomalia (Seeber, 2003; Monico, 2008). Isso faz com que o Brasil se localize em uma região privilegiada para estudos sobre esse tema, uma vez que grande parte de seu território encontra-se na região equatorial, fortemente afetada por esses efeitos. Além disso, devido à sua extensão territorial, o Brasil apresenta regiões com diferentes condições ionosféricas.
Por não ser um meio regular, a ionosfera é responsável por diversas anomalias que podem causar diferentes tipos de influência e degradação do sinal GNSS, incluindo a cintilação ionosférica. A cintilação ionosférica corresponde a flutuações da amplitude ou fase de uma onda de rádio em decorrência de sua propagação em uma região com irregularidades na densidade de elétrons. Ela pode causar o enfraquecimento do sinal recebido pelos receptores e até mesmo a perda do sinal (Conker et al., 2003).
Conforme mencionado anteriormente, por ter oferecido constante disponibilidade, o uso do GPS teve também maior disseminação na comunidade civil e maior número de pesquisas desenvolvidas. Já com o GLONASS é possível observar uma expressiva diminuição das pesquisas durante o período de sua degradação e, posteriormente, com a reestruturação do sistema, foi possível verificar um novo interesse nas investigações envolvendo o GLONASS (Jerez e Alves, 2018). Entre as pesquisas posteriores ao seu restabelecimento, pode ser mencionado Pinto et al. (2013), Pan et al. (2014) e Ventorim e Dal Poz (2016). A partir desta nova fase do GLONASS e dos resultados promissores obtidos em alguns estudos relacionados, surge a motivação para o desenvolvimento de investigações abrangendo seu uso nos diversos métodos de posicionamento, considerando as diferentes fontes de erro que impactam diretamente essa área da geodésia.
Neste sentido, a presente pesquisa teve como intuito investigar a viabilidade da integração de dados GPS e GLONASS para o posicionamento sob efeito de cintilação ionosférica no Brasil. Para isso foram aplicados três métodos de posicionamento, dois a partir de ferramentas já disponíveis (uma de forma pública e online e outra comercial) e o terceiro em um sistema científico, no qual implementações foram realizadas para preparar o mesmo para a utilização de dados GLONASS. Além disso, foi analisada a influência da ionosfera no posicionamento, sendo que para isso foram utilizados dados de estações de regiões brasileiras que apresentam diferentes comportamentos ionosféricos, e considerando períodos do ano com menor e maior atividade ionosférica. Além disso, foi possível investigar a influência da cintilação ionosférica nos sinais GPS e GLONASS, com a análise de índices de irregularidade e cintilação ionosférica, obtidos a partir de dados da Rede CIGALA/CALIBRA (Concept for Ionospheric Scintillation Mitigation for professional GNSS in Latin America / Countering GNSS high Accuracy applications Limitations due to Ionopheric disturbances in BRAzil), que possui estações de monitoramento da ionosfera.
O presente trabalho busca compilar os principais resultados obtidos no desenvolvimento desta pesquisa. O capítulo 2 apresenta uma revisão teórica do sistema GLONASS. No capítulo 3 são apresentados os principais resultados obtidos em diferentes métodos de posicionamento. A seção 3.1 apresenta os resultados com posicionamento por ponto; a seção 3.2 discute os resultados com posicionamento relativo; a seção 3.3 apresenta os resultados com posicionamento em redes, especificamente aplicando o conceito de estação virtual; e na seção 3.4 é apresentado um estudo considerando a influência da posição geográfica no posicionamento por ponto. Por fim, na seção 4 são apresentadas as considerações finais.
2. GLONASS: breve revisão teórica
O GLONASS (oficialmente Global’naya Navigationnnaya Sputnikowaya Sistema) é o sistema desenvolvido pela antiga União Soviética. Assim como o GPS, o GLONASS foi desenvolvido inicialmente com finalidade militar e, posteriormente, passou a ter sua utilização expandida para uso civil (Monico, 2008; Seeber, 2003).
Após um longo período de degradação, em 2001 teve início um plano de modernização e restauração do GLONASS. Com seu restabelecimento foi possível notar novo interesse nas possibilidades de aplicação do sistema. Não apenas nas pesquisas envolvendo o tema, como também no desenvolvimento de produtos que utilizam o sistema, desde celulares com sistemas de navegação até receptores convencionais (Jerez e Alves, 2018).
Em relação ao segmento espacial, o GLONASS é constituído de 24 satélites operacionais e 03 de reserva, distribuídos em três planos orbitais aproximadamente circulares, separados em 120°, inclinados aproximadamente 64,8° em relação ao equador. A altitude média é de 19.100 km e período orbital de 11h15min44seg (Tempo Sideral). Devido ao ângulo de inclinação maior que o do GPS (55°), a constelação GLONASS apresenta cobertura um pouco diferente, podendo fornecer melhor cobertura para altas latitudes. Com o sistema completo, entre seis e onze satélites são visíveis em qualquer ponto da Terra (Monico, 2008; Seeber, 2003).
Quanto às frequências, na concepção original, a tecnologia utilizada é a FDMA (Frequency Division Multiple Access), na qual cada satélite transmite em uma frequência, sendo o satélite identificado de acordo com a mesma (Seeber, 2003). Os demais sistemas utilizam a técnica CDMA (Code Division Multiple Access), na qual todos os satélites transmitem na mesma frequência (Seeber, 2003). Os satélites das últimas gerações GLONASS também passaram a transmitir sinal CDMA, além dos originais FDMA.
Quanto às informações das órbitas dos satélites, as efemérides precisas GLONASS são produzidas e disponibilizadas desde 1998 seguindo o mesmo formato de arquivo das efemérides precisas GPS. Já nas efemérides transmitidas, ao invés dos elementos keplerianos usados nas efemérides GPS, são fornecidas as posições, velocidades e acelerações dos satélites, causadas pelas perturbações gravitacionais do sol e da lua (Hofmann-Wellenhof et al., 2008).
O segmento de controle é composto pelo sistema de controle central, pela central responsável pela sincronização do tempo GLONASS e pelas estações de rastreio. Entre outras atribuições de responsabilidade do segmento de controle Monico (2008) cita: a predição das órbitas dos satélites; a transferência das efemérides, das correções dos relógios e dos almanaques em cada um dos satélites; a sincronização dos relógios dos satélites com o sistema de tempo do GLONASS; a estimativa das discrepâncias entre o sistema de tempo do GLONASS e o TUCUS (TUC da União Soviética); e o controle dos satélites. O segmento de controle é também responsável por atividades não operacionais como de aquisição e lançamento (Hofmann-Wellenhof et al., 2008). O controle central do GLONASS é localizado na cidade de Moscou. As estações de monitoramento, inicialmente distribuídas de maneira homogênea no território da antiga União Soviética, estão sendo expandidas por diversos países desde 2013, incluindo o Brasil (Jerez e Alves, 2018).
Com a modernização do GLONASS, novas gerações de satélites foram desenvolvidas, sendo a primeira delas a dos satélites GLONASS-M, posteriormente foram desenvolvidos os GLONASS-K1 e, atualmente, está em desenvolvimento a geração dos satélites GLONASS-K2. A revisão dos principais conceitos do sistema e seu estado da arte são apresentados em Jerez e Alves (2018).
3. Uso combinado GPS/GLONASS em métodos de posicionamento GNSS
3.1 Posicionamento por ponto
Na primeira etapa da pesquisa, a utilização de dados GPS/GLONASS foi verificada no posicionamento por ponto (Hofmann-Wellenhof et al., 2008; Teunisssen e Montenbruck, 2017), obtendo significativa melhoria na qualidade das coordenadas obtidas com uso de dados combinados, se comparadas ao posicionamento autônomo com GPS. Para a aplicação do posicionamento por ponto foram utilizados dados de seis estações GNSS (Figura 1) pertencentes à RBMC (Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS), distribuídas em três regiões brasileiras com comportamento ionosférico distinto: uma região mais próxima ao equador geomagnético (CEFT e PBJP), uma região sob influência do efeito fonte (latitudes ±15°) (SPDR e PPTE) e uma região com menor atividade ionosférica (SCFL e POAL).
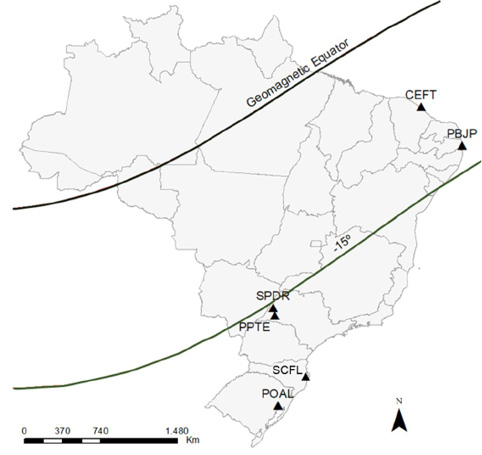
Figura 1. Localização das estações da RBMC utilizadas no posicionamento por ponto.
Os processamentos foram realizados utilizando o software online CSRS-PPP (Canadian Spatial Reference System – Precise Point Positioning) da NRCan (Natural Resources Canada) em modo estático (NRCAN, 2016). Foram utilizados arquivos somente com dados da constelação GPS e com dados mistos das constelações GPS e GLONASS. Os períodos selecionados foram dos meses de junho e outubro de 2014, caracterizados como períodos com menor e maior atividade ionosférica, respectivamente. Os intervalos de dados utilizados foram de 30 minutos e 04 horas (com início às 00h TU – Tempo Universal). Além disso, foram considerados dados apenas da portadora L1 e das portadoras L1 e L2.
De maneira geral, foi possível verificar melhoria no erro obtido com posicionamento por ponto ao adicionar dados GLONASS. A Figura 2 apresenta o erro médio quadrático (EMQ) do posicionamento com dados de 30 minutos da estação CEFT considerando dados de junho com L1 (a) e L1/L2 (b) e dados de outubro com L1 (c) e L1/L2 (d). Nos resultados a partir de dados de simples e de dupla frequência é possível verificar o impacto sazonal da ionosfera no erro obtido com o posicionamento. Em outubro os valores de EMQ são maiores e mais irregulares que os observados em junho. Além disso, é possível observar a influência do uso de dados de simples ou dupla frequência, sendo que os resultados com dados de simples frequência apresentam erros com ordem
de grandeza em torno de dez vezes maiores que os obtidos com dupla frequência.
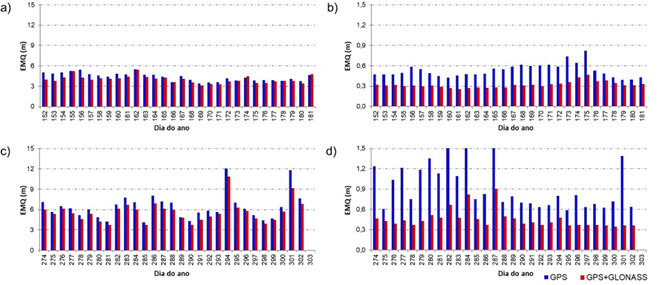
Figura 2. EMQ obtido com o posicionamento por ponto considerando a estação CEFT com 30 minutos de dados: a) L1 com dados de junho; b) L1/L2 com dados de junho; c) L1 com dados de outubro; d) L1/L2 com dados de outubro.
Os demais casos analisados apresentaram comportamento semelhante em relação aos períodos considerados e os dados utilizados (L1 ou L1/L2). Além disso, foi possível verificar a influência da região da estação, com isso, a região com os maiores erros e irregularidades foi a afetada pelo efeito fonte (estações PPTE e SPDR), enquanto a região com menor atividade ionosférica (SCFL e POAL) apresentou os menores e mais regulares EMQs. Foi observada melhoria em 97,35% dos casos analisados ao se considerar dados GPS/GLONASS no posicionamento por ponto. A melhoria média obtida foi em torno de 30%.
Em relação aos resultados para quatro horas de dados, os EMQs seguiram padrão de comportamento semelhante em relação à sazonalidade, tipo de dados (L1 ou L1/L2) e região da estação, porém, com erros significantemente menores. Para dados de dupla frequência, por exemplo, todos os cenários apresentaram resultados com erros inferiores a 30 cm. Mais detalhes são apresentados em Jerez e Alves (2020).
Para complementar esse estudo, algumas técnicas de análise multivariada foram aplicadas utilizando os dados apresentados anteriormente, além de índices de cintilação ionosférica obtidos a partir de estações de monitoramento próximas às três regiões selecionadas. Os estudos estatísticos consideraram índices de correlação, análise de agrupamento, análise fatorial e análise de correspondência. A Figura 3 apresenta os resultados da análise de correspondência considerando 30 minutos de dados de L1. Nesta figura, o índice ‘GR’ adicionado ao nome das estações indica a utilização de dados GPS e GLONASS, enquanto os pontos com apenas os nomes das estações indicam uso de apenas dados GPS.
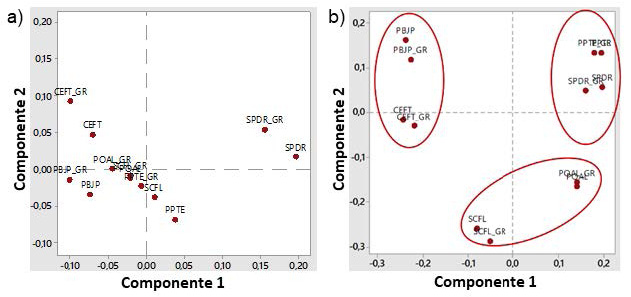
Figura 3. Análise de correspondência para GPS e GPS/GLONASS com dados de L1 em junho (a) e outubro (b).
Na análise de correspondência é explorada a relação ou associação entre variáveis. A proximidade entre os pontos plotados a partir das componentes 1 e 2 indica a relação entre as variáveis utilizadas. A partir disso, nota-se que em junho os resultados obtidos se assemelham entre as estações, porém em outubro (quando se tem maior influência ionosférica) a divisão entre as regiões consideradas fica bem definida. Vale ressaltar também a proximidade entre os resultados obtidos com GPS e GPS/GLONASS, uma vez que, apesar da melhoria observada com o uso adicional do GLONASS, os erros obtidos com posicionamento combinado ou autônomo seguem comportamento semelhante. Mais detalhes deste estudo e os resultados obtidos com as demais análises estatísticas são apresentados em Jerez et al. (2019).
3.2 Posicionamento relativo
A utilização de dados GPS/GLONASS no posicionamento relativo (Hofmann-Wellenhof et al., 2008; Teunisssen e Montenbruck, 2017) também proporcionou melhoria em relação ao uso apenas do GPS. Novamente as estações GNSS pertencentes à RBMC foram utilizadas, mantendo-se as três regiões brasileiras com comportamento ionosférico distinto consideradas anteriormente. Porém, como no posicionamento relativo existe a dependência de um número maior de estações, a seleção das estações foi mais limitada em relação à posição e disponibilidade de dados. A Figura 4 apresenta a localização das estações cujas coordenadas foram estimadas no posicionamento relativo e a Tabela 1 apresenta a lista de todas as estações utilizadas, bem como os respectivos comprimentos das linhas de base formadas. Para cada estação a ter coordenadas estimadas, foram utilizados dois pares de estações de referência, um mais próximo e mais distante.

Figura 4. Localização das estações da RBMC cujas coordenadas foram estimadas no posicionamento relativo.
Tabla 1. Estações utilizadas no posicionamento relativo e respectivos comprimentos de linhas de base
Estação |
Linhas menores |
Linhas maiores |
||
Bases |
Comprimento (km) |
Bases |
Comprimento (km) |
|
PBCG |
PBJP |
115 |
RNMO |
280 |
RECF |
140 |
ALAR |
290 |
|
SPDR |
ILHA |
120 |
SJRP |
240 |
SPTU |
120 |
OURI |
240 |
|
SCLA |
IMBT |
170 |
SCCH |
230 |
SCFL |
180 |
POAL |
270 |
|
Os processamentos foram realizados no modo estático utilizando o software comercial TBC (Trimble Business Center). Os processamentos foram configurados utilizando somente dados da constelação GPS e dados das constelações GPS e GLONASS. De maneira análoga ao estudo anterior, foram utilizados dados dos meses de junho e outubro de 2014, com intervalo de tempo de 30 minutos e 04 horas (com início às 00h TU). Foram utilizados dados de dupla frequência, o SIRGAS2000 foi adotado como sistema de referência e, além disso, foram utilizadas efemérides transmitidas e máscara de elevação de 10°.
A Figura 5 apresenta os EMQs obtidos com o posicionamento relativo para a estimativa das coordenadas da estação PBCG, considerando 30 minutos de dados de junho com as linhas de base menor (a) e maior (b); e de outubro com as linhas de base menor (c) e maior (d). De forma geral, é possível verificar EMQs maiores e mais irregulares nos resultados de outubro se comparado aos de junho. Além disso, em relação aos comprimentos de linha de base, as linhas de base mais longas também levaram a maiores discrepâncias. Os valores de EMQs observados em todas as configurações, em comparação ao estudo anterior, apresentaram maior magnitude e irregularidade. Novamente, os cenários considerando quatro horas de dados apresentaram significativa redução no erro obtido.
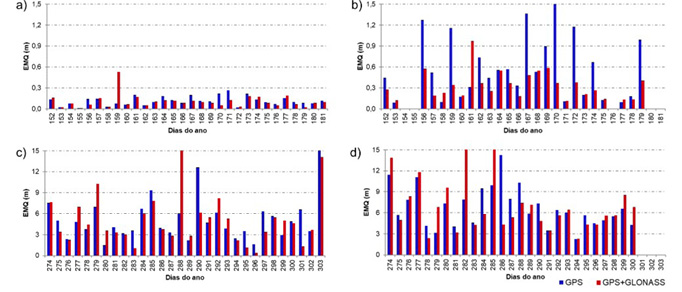
Figura 5. EMQ para posicionamento relativo considerando a estação PBCG com 30 minutos de dados: a) linha menor com dados de junho; b) linha maior com dados de junho; c) linha menor com dados de outubro; d) linha maior com dados de outubro.
Diferente do que foi observado no posicionamento por ponto, com o posicionamento relativo a melhoria com a inclusão de dados GLONASS não foi constante em todos os dias analisados. Porém, ainda assim, a maior parte dos dias considerados apresentou melhorias com a utilização de dados combinados. Em torno de 70% dos dados dos dias analisados apresentaram melhorias no posicionamento com o uso de dados GPS/GLONASS, considerando-se diferentes cenários em relação aos tamanhos de linha de base, aos intervalos de tempo de coleta e às regiões consideradas. As análises de todas os cenários considerados são apresentadas em Jerez et al. (2018).
3.3 Posicionamento em redes
Considerando o posicionamento em redes, foi aplicado o conceito de VRS (Virtual Reference Station) (Hofmann-Wellenhof et al., 2008; Alves e Monico, 2011). Para isso, o sistema desenvolvido por Alves (2008) foi adaptado para também gerar dados virtuais GLONASS. Com isso, foi possível gerar dados virtuais nas posições de estações reais, permitindo a comparação do desempenho de dados reais e virtuais. Novamente, estações da RBMC foram utilizadas, considerando três regiões do Brasil. A Figura 6 apresenta a localização das estações utilizadas como base (no conceito de VRS), bem como as estações cujas posições foram utilizadas para a geração de estações virtuais.
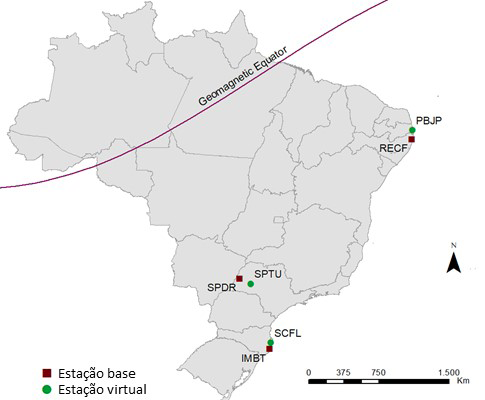
Figura 6. Localização das estações da RBMC utilizadas como base e estação virtual no posicionamento em redes.
Após a obtenção dos dados virtuais, os mesmos foram processados de maneira análoga ao estudo de posicionamento por ponto apresentado anteriormente (Seção 3.1). Desta maneira, foi possível comparar o desempenho dos dados virtuais e reais, considerando GPS e GPS/GLONASS. Para este estudo, foi considerado o tempo de 30 minutos de coleta. A Figura 7 apresenta os EMQs obtidos com o posicionamento por ponto utilizando dados virtuais e reais para a estação PBJP. Além da influência sazonal, com maiores erros em outubro, conforme já observada no posicionamento por ponto e no posicionamento relativo, neste caso é possível verificar melhoria com o uso de dados GPS/GLONASS em todos os cenários considerados. Vale ressaltar ainda a semelhança entre os resultados obtidos com dados reais e virtuais.
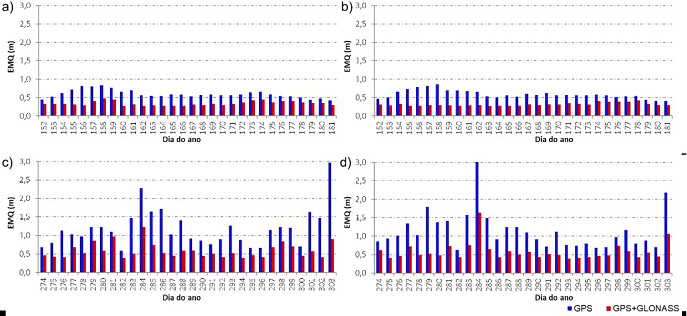
Figura 7. EMQ obtido com o posicionamento por ponto considerando a posição da estação PBJP com 30 minutos de dados: a) dados virtuais de junho; b) dados reais de junho; c) dados virtuais de outubro; d) dados reais outubro.
Considerando-se as porcentagens de melhoria mínima, média e máxima com a inclusão do GLONASS, foram observadas variações nas porcentagens de uma região para a outra, porém, as variações foram semelhantes comparando-se dados reais e virtuais. As melhorias médias obtidas com o uso de dados combinados foram em torno de 50% nas três regiões consideradas. O estudo completo é apresentado em Jerez & Alves (2019).
3.4 Posicionamento em diferentes latitudes
O último estudo em relação ao GLONASS foi realizado para verificar a influência do conceito teórico mencionado anteriormente (Seção 2), em que se indica uma possível melhor cobertura em altas latitudes pelo sistema GLONASS. Para isso, 20 estações da rede IGS (International GNSS Service) em todo o globo, com pares de latitudes semelhantes, foram selecionadas para avaliação do desempenho no posicionamento por ponto preciso. Foram considerados dados de junho de 2017, com o intuito de evitar a influência ionosférica, o tempo de coleta utilizado foi de 30 minutos. Os processamentos foram realizados de maneira análoga ao apresentado na seção 3.1, porém, neste estudo, além do posicionamento com dados GPS e GPS/GLONAS, também foi utilizado o posicionamento com dados GLONASS de forma autônoma. A Figura 8 apresenta a distribuição das estações utilizadas.
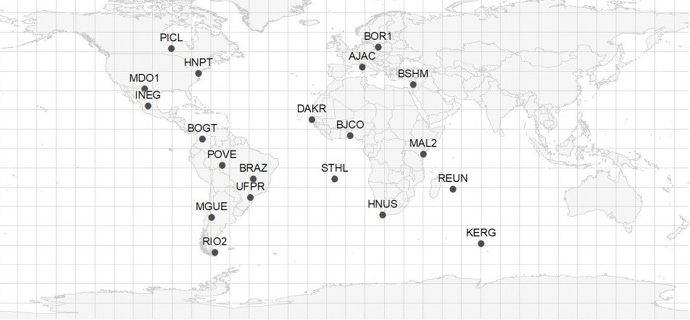
Figura 8. Localização das estações da rede IGS utilizadas no posicionamento por ponto.
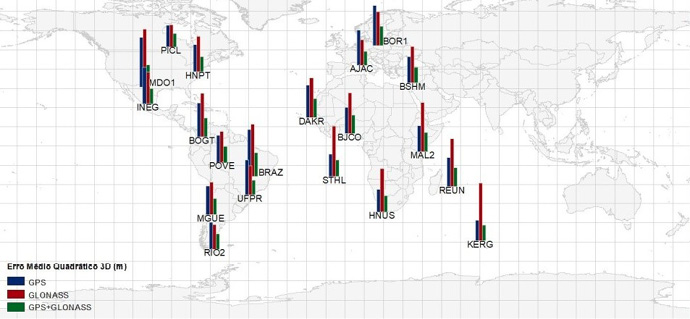
Figura 9. EMQ obtido com o posicionamento por ponto com GPS, GLONASS e GPS/GLONASS considerando as estações da rede IGS.
Na Figura 9 são apresentados os EMQs obtidos com o posicionamento por ponto para GPS, GLONASS e GPS/GLONASS. É possível verificar que, em geral, o GPS teve desempenho melhor que o GLONASS no modo autônomo. Em média, o erro obtido com o GLONASS foi 30 % maior que o obtido com GPS. Além disso, também foram analisadas as porcentagens de dias em que cada sistema proporcionou melhores resultados para cada estação. O GPS apresentou maiores porcentagens de dias com melhor desempenho para a maioria dos casos, porém, em 25% das estações o GLONASS proporcionou melhores resultados. Em todos os cenários analisados, o uso combinado GPS/GLONASS apresentou os menores erros. Em relação ao melhor desempenho do GLONASS em altas latitudes, não foi possível verificar um padrão claro de comportamento. O estudo completo desta abordagem é apresentado em Jerez et al. (2020).
4. Conclusões
O presente estudo teve objetivo de realizar uma revisão teórica do sistema russo GLONASS e verificar o impacto do seu uso combinado aos dados do sistema GPS, considerando regiões e períodos com diferentes influências ionosféricas. Diversos trabalhos derivados desse estudo foram apresentados em relação ao levantamento teórico realizado (Jerez & Alves, 2018), aplicações no PPP (Jerez et al., 2019; Jerez & Alves, 2020), no posicionamento relativo (Jerez et al. 2018), no posicionamento em redes, aplicando o conceito de estações virtuais (Jerez & Alves, 2019) e no estudo da influência da posição no globo (Jerez et al., 2020). Os trabalhos são derivados da pesquisa desenvolvida em Jerez (2017) e, de maneira geral, os trabalhos permitiram comprovar a melhoria na performance do posicionamento utilizando dados combinados GPS/GLONASS em comparação ao GPS de forma autônoma, em especial quando menores intervalos de coleta e períodos de intensa atividade ionosférica são considerados.
Além disso, alguns experimentos desenvolvidos nesta pesquisa indicaram a influência que a atividade ionosférica pode ter na estimativa de índices de multicaminho (MP1 e MP2). Alguns estudos iniciais podem ser verificados em Jerez, Pereira et al. (2017), Jerez e Alves (2018) e Alves et al. (2021). Este tema continua sendo investigado atualmente considerando análises de séries temporais e a possibilidade do uso desses índices para monitoramento e identificação de períodos de maior atividade ionosférica.
Bibliografía
Alves, D. B. M. (2008). Posicionamento Baseado em redes GPS utilizando o conceito de estação virtual [Tese doutorado, Universidade Estadual Paulista].
Alves, D. B. M., & Monico, J. F. G. (2011). GPS/VRS positioning using atmospheric modeling. GPS Solutions, 15 (3), 253-261. https://doi.org/10.1007/s10291-010-0187-3
Alves, D. B. M.; Jerez, G. O.; Setti Junior, P. T. (2021). Analysis of multipath index time series using data from Brazilian GNSS stations under different ionospheric conditions. Em VIII Simpósio Brasileiro de Geofísica Espacial e Aeronomia e VIII Simpósio de Física e Astronomia do Vale do Paraíba, 2021. Abstract Book of VIII SBGEA & VIII SIMFAST.
Bruyninx, C. (2007). Comparing GPS-only with GPS + GLONASS positioning in a regional permanent GNSS network. GPS Solutions, 11 (2), 97-106. https://doi.org/10.1007/s10291-006-0041-9
Conker, R. S., El-Arini, M. B., Hegarty, C. J., & Hsiao, T. (2003). Modeling the effects of ionospheric scintillation on GPS/Satellite-Based augmentation system Availability. Radio Science, 38 (1), 1-23. https://doi.org/10.1029/2000RS002604
Feairheller, S., & Clark, R. (2006). Other Satellite Navigation Systems. In: Kaplan, E. D.; Hegarty, C. J. (Eds). Undertanding GPS: Principles and Applications, 2 ed. Artech House, Norwood, pp. 595-634.
Hofmann-Wellenhof, B., Lichtenegger, H., & Wasle, E. (2008). GNSS–Global Navigation Satellite Systems GPS, GLONASS, Galileo and more. New York: Springer-Verlag, pp. 516.
Jerez, G. O. (2017). Análise da integração GPS/GLONASS para posicionamento sob efeito de cintilação ionosférica. [Dissertação Mestrado, Universidad Estadual Paulista]
Jerez, G. O., & Alves, D. B. M. (2018). GLONASS: Revisão teórica e estado da arte. Revista Brasileira de Geomática, 6, 155-173. https://doi.org/10.3895/rbgeo.v6n2.7368
Jerez, G. O., & Alves, D. B. M. (2019). Generation and performance analysis of GPS and GLONASS virtual data for positioning under ionospheric influence. Boletim de Ciências Geodésicas, (25), 1-17. https://doi.org/10.1590/s1982-21702019000200007
Jerez, G. O., & Alves, D. B. M. (2020). Assessment of GPS/GLONASS point positioning in Brazilian regions with distinct ionospheric behavior. Boletim de Ciências Geodésicas, 26, 1-15. https://doi.org/10.1590/s1982-21702020000200010
Jerez, G. O., Alves, D. B. M., & Tachibana, V. M. (2019). Multivariate analysis of combined GPS/GLONASS point positioning performance in Brazilian regions under different ionospheric conditions. Journal of Atmospheric and Solar-Terrestrial Physics, 187, 1-9. https://doi.org/10.1016/j.jastp.2019.03.003
Jerez, G. O., Alves, D. B. M., & Vieira, J. V. E. (2018). Avaliação do posicionamento relativo GPS/GLONASS sob influência ionosférica. Em COBRAC 2018, 13º Congresso Brasileiro de Cadastro Técnico Multifinalitário e Gestão Territorial, 2018, pp. 1-18. https://ocs.cobrac.ufsc.br/index.php/cobrac/cobrac2018/paper/view/390
Jerez, G. O., Vieira, J. V. E., & Alves, D. B. M. (2020). Análise do posicionamento por ponto preciso com dados GPS e GLONASS em diferentes latitudes. Anuário do Instituto de Geociências, 43, 55-65. https://doi.org/10.11137/2020_4_55_65
Jerez, G. O., & Alves, D. B. M. (2018). Monitoramento da atividade ionosférica utilizando índices de multicaminho. Em VII Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação, 2018, Anais do VII SIMGEO, 2018, pp. 695-703.
Jerez, G. O., Alves, D. B. M., Pereira, V. A. S., & Souza, A. L. C. (2017). Investigação da relação entre os índices de multicaminho dos sinais GNSS e os efeitos ionosféricos. Em XXVII Congresso Brasileiro de Cartografia e XXVI Exposicarta, XXVII Congresso Brasileiro de Cartografia e XXVI Exposicarta, 2017, pp. 83-87.
Monico, J. F. G. (2008). Posicionamento pelo GNSS: Fundamentos, Definição e Aplicação. 2 ed. São Paulo: Editora UNESP, pp. 476
NRCan. http://webapp.geod.nrcan.gc.ca/geod/tools-outils/ppp.php?locale=en
Pan, L. Cai, C. Santerre, R. & Zhu, J. (2014). Combined GPS/GLONASS precise point positioning with fixed ambiguities. Sensors, 14 (9), 17530-17547. https://doi.org/10.3390/s140917530
Pinto, M. S., Camargo, P. O., & Monico, J. F. G. (2013). Influência da combinação de dados GPS e GLONASS no georreferenciamento de imóveis rurais. Boletim de Ciências Geodésicas, 19(1), 135-151. https://doi.org/10.1590/S1982-21702013000100009
Polezel, W. G. C. (2010). Investigações sobre o impacto da modernização do GNSS no posicionamento. [Dissertação Mestrado, Universide Estadual Pauliista].
Polischuk, G. M., Kozlov, V. I., Ilitchov, V. V., Kozlov, A. G., Bartenev, V. A., Kossenko, V. E.,…, Vorokhovsky, Y.L., (2002). The global navigation satellite system GLONASS: development and usage in the 21st century. In Proceedings of the 34th Annual Precise Time and Time Interval (PTTI), Systems and Applications Meeting, Virginia, December 3–5, (pp. 151–160. https://ion.org/publications/abstract.cfm?articleID=13935
Seeber, G. (2003). Satellite Geodesy: Foundations, Methods, and Applications. Berlin, New York: Walter de Gruyter, pp. 589.
Teunissen, P., Montenbruck, O. (Eds.) (2017). Springer Handbook of Global Navigation Satellite Systems. Springer, pp. 1334.
Ventorim, B. G., Dal Poz, W. R. (2016). Avaliação do desempenho dos sistemas GPS e GLONASS no posicionamento por ponto preciso, combinados e individualmente. Boletim de Ciências Geodésicas, 22(2), 265-281. https://doi.org/10.1590/S1982-21702016000200015
1 Universidade Estadual Paulista (UNESP), Brasil, e-mail: gabriel.jerez@unesp.br
ORCID: https://orcid.org/0000-0001-6893-2144
2 Universidade Estadual Paulista (UNESP), Brasil, e-mail: daniele.barroca@unesp.br
ORCID: https://orcid.org/0000-0002-9033-8499
11-35